Hello,
I made 2 cars that are scoring at Dalluha…Hypercars!
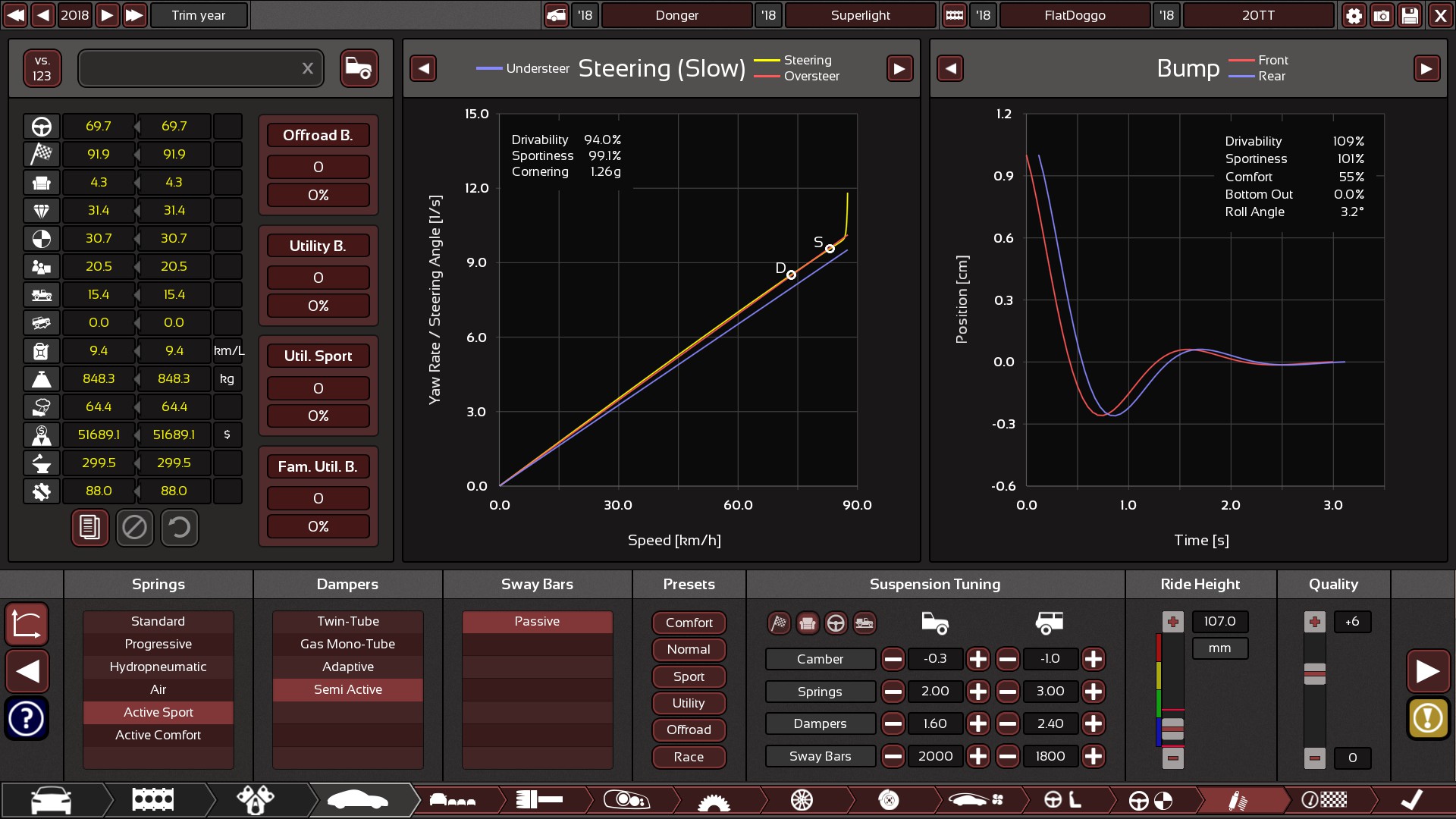
And I have a problem, after I tuned it, and retuned it with the help of the discord (special thanks to goblin95 and MrChips), it’s undriveable anyway…
At high speed, the cars steer left or right (What I noticed is the Donger Superlight, the blue one, steers left more than right), and it’s impossible to reach the top speed of the car.
The tuning on Automation is good IMO, cars aren’t scoring so bad (more than 100 on their best market)… But may be I do something wrong?
I use mods, I don’t know if it’s because of this, or the exporter, or anything else, that’s why I post my problem here! 
Donger - Crustacean.car (39.7 KB)
Donger - Superlight.car (33.3 KB)





 is it possible that my game has a problem?
is it possible that my game has a problem?